
Neurorobotics in HBP and EBRAINS
Neurorobotics is an emerging transdisciplinary field of research at the interface between neuroscience, artificial intelligence and robotics. The Neurorobotic Platform is the solution for embodied simulation developed in the context of the Human Brain Project to be at the core of the EBRAINS Closed-Loop Neuroscience service offered by the EBRAINS Research Infrastructure.
The Neurorobotics Platform - NRP
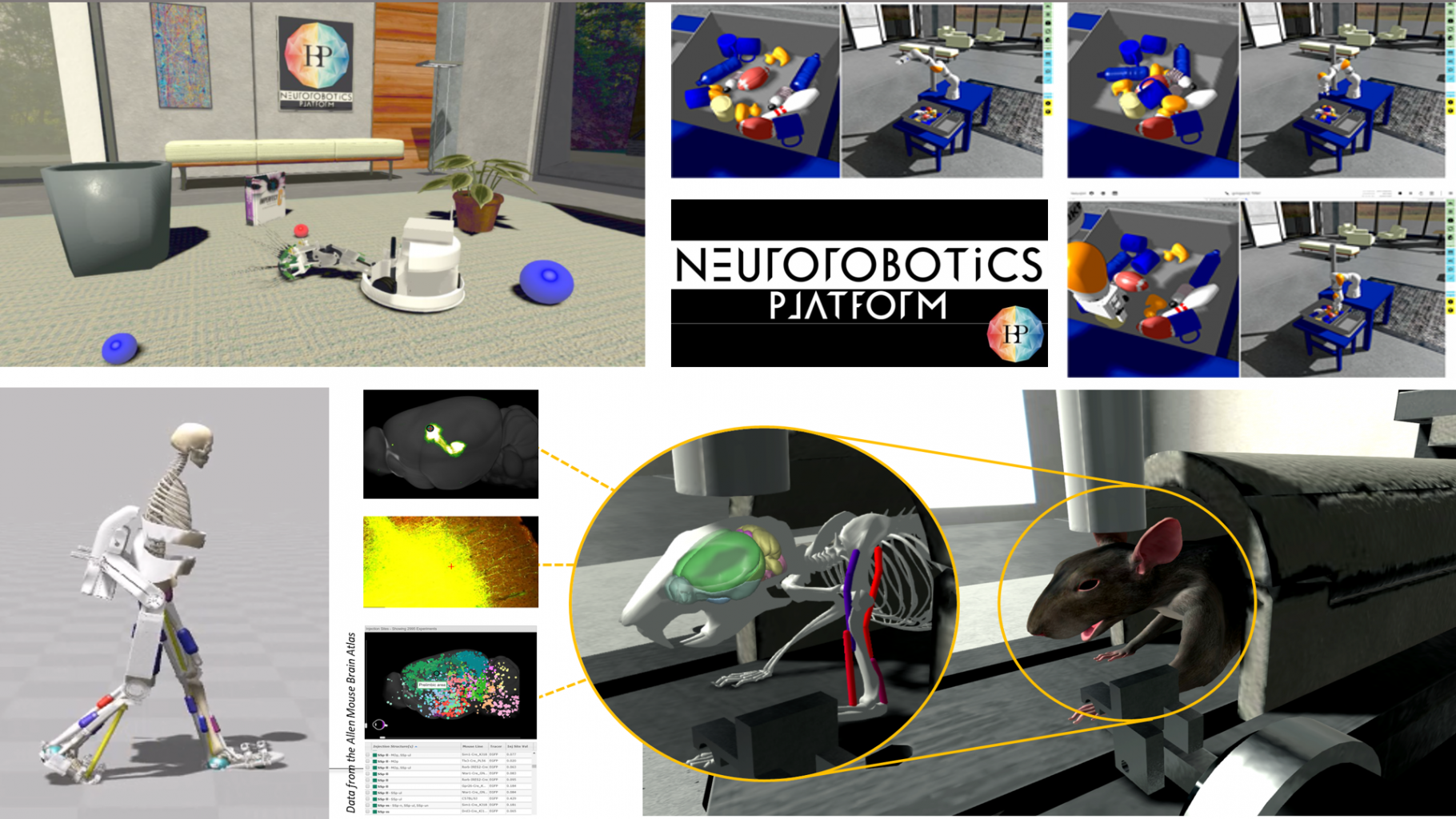
The NRP is an integrative simulation framework that enables in silico experimentation and embodiment of brain models inside virtual agents interacting with realistic simulated environments.
-
It is entirely open source
-
It offers a browser-based graphical user interface for online access
-
It can be installed locally (Docker or source install)
-
It can be interfaced with multiple neuromorphic chips (SpiNNaker, Intel Loihi)
Our community of users includes roboticists, computational neuroscientists, and engineers working on applications of neuromorphic computing. However, anyone with a working knowledge of Python can easily learn how to use our platform.
You can download and install the NRP locally for maximum experimental convenience, or access it online in order to leverage the EBRAINS HPC infrastructure for large-scale experiments.
ACCESS THE NRP
REQUEST ACCESS HEREHow the NRP can support your research
The NRP is an integrative ecosystem, with special consideration given to creating software interfaces and APIs that enable integration of not only simulation engines, but also of tools for design, analytics, databases, and more.
The NRP helps you improve and refine novel models of brain functions and architecture.
The functional connection of neural models to embodied agents allows neuroscientists to explore how the brain performs a number of tasks in closed loop, from lower-level sensorimotor tasks, to higher cognitive functions (e.g. contextual awareness, decision making, etc.).
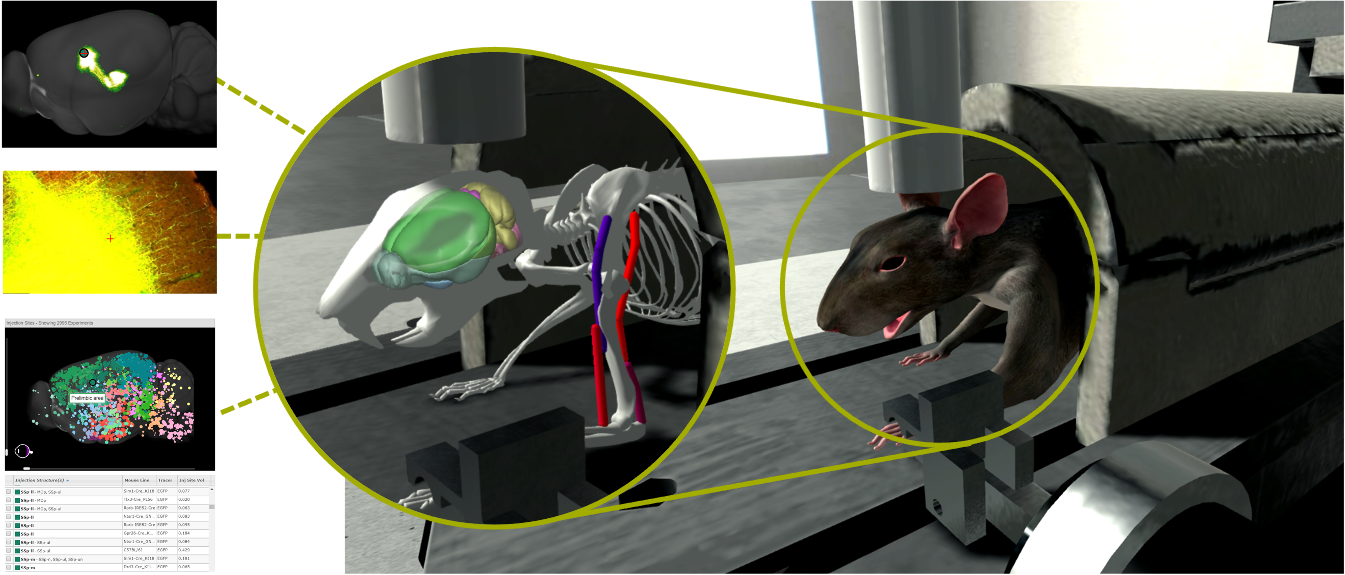 Physical sensorimotor mouse experiment and simulation on the Neurorobotics Platform
Physical sensorimotor mouse experiment and simulation on the Neurorobotics Platform
The NRP helps you design robots with enhanced decision-making capabilities and contextual awareness for use in autonomous exploration (deep sea, space), search and rescue in disaster areas, and more.
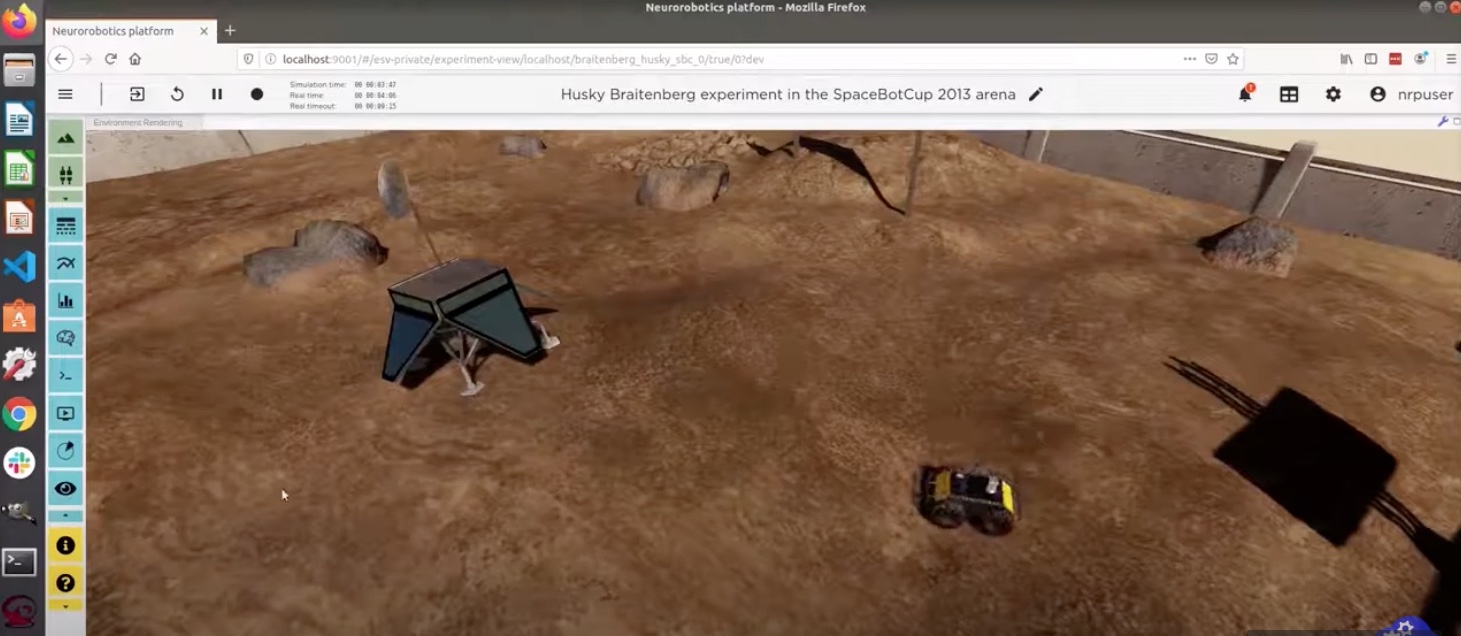 Environment exploration in the NRP
Environment exploration in the NRP
The NRP supports investigation and testing of interaction with AI-enabled autonomous systems in VR settings for development of novel, cost effective robotic control technologies.
A related publication can be found at the bottom of this page.
Ongoing work by TUM researcher Sandro Weber on VR Re-Embodiment.
The NRP allows you full control of experimental parameters and let you define adequate testing setups for functional evaluation. For instance, simulations of the interactions between an agent and its environment are fundamental in order to implement data-driven model-less approaches to synthesising control policies (e.g. reinforcement learning). These are seen as key to producing robotic systems capable of complex online decision-making or adaptation (e.g. to previously unseen situations, changes in operational parameters, etc.) but they usually require large amounts of data for training purposes. This is not an issue for the NRP, as multiple instances of the latter can indeed be deployed and synchronised on the High-Performance Computing infrastructure of EBRAINS.
Important publications
Rachael Stentiford, Thomas C. Knowles, Benedikt Feldotto, Deniz Ergene, Fabrice O. Morin, Martin J. Pearson
Living Machines 2022: Biomimetic and Biohybrid Systems 2022-12-02Benedikt Feldotto, Jochen Martin Eppler, Cristian Jimenez-Romero, Christopher Bignamini, Carlos Enrique Gutierrez, Ugo Albanese, Eloy Retamino, Viktor Vorobev, Vahid Zolfaghari, Alex Upton, Zhe Sun, Hiroshi Yamaura, Morteza Heidarinejad, Wouter Klijn, Abigail Morrison, Felipe Cruz, Colin McMurtrie, Alois C. Knoll, Jun Igarashi, Tadashi Yamazaki, K…
Frontiers in Neuroinformatics, Vol. 16 2022-05-19Zhenshan Bing, Amir EI Sewisy, Genghang Zhuang, Florian Walter, Fabrice O. Morin, Kai Huang, Alois Knoll
IEEE Transactions on Neural Networks and Learning Systems 2021-12-03Zhenshan Bing, Christian Lemke, Fabric O. Morin, Zhuangyi Jiang, Long Cheng, Kai Huang, Alois Knoll
Frontiers in Neurorobotics, Vol. 14 2020-10-20Alban Bornet, Jacques Kaiser, Alexander Kroner, Egidio Falotico, Alessandro Ambrosano, Kepa Cantero, Michael H. Herzog, Gregory Francis
Frontiers in Neurorobotics, Vol. 13 2019-05-29J. Camilo Vasquez Tieck, Heiko Donat, Jacques Kaiser, Igor Peric, Stefan Ulbrich, Arne Roennau, Marius Zöllner, Rüdiger Dillmann
Artificial Neural Networks and Machine Learning - ICANN 2017 2017-10-24A. Knoll, F. Röhrbein, M. Akl, A. Kuhn, K. Sharma
x 2017-04-01Falotico, Egidio and Vannucci, Lorenzo and Ambrosano, Alessandro and Albanese, Ugo and Ulbrich, Stefan and Vasquez Tieck, Juan Camilo and Hinkel, Georg and Kaiser, Jacques and Peric, Igor and Denninger, Oliver and Cauli, Nino and Kirtay, Murat and Roennau, Arne and Klinker, Gudrun and Von Arnim, Axel and Guyot, Luc and Peppicelli, Daniel and Martí…
Frontiers in Neurorobotics, Vol. 11 2017-01-25Alois Knoll and Marc-Oliver Gewaltig
Brain-inspired intelligent robotics: The intersection of robotics and neuroscience 2016-12-16